Kostenlosen Vorlagen für das Gesellschaftsspiel mit verschiedenen Varianten und zusätzlichen Kategorien
Ladet euch die hier bereitgestellten Vorlagen als PDF herunter und druckt euch die Spielbögen nach Bedarf aus.
- Standard-Spielbogen mit einem freien Zusatzfeld, in dem selbst Eintragungen für eine weitere Kategorie vorgenommen werden kann. Dazu sind, neben der Spalte für die Punkte, die Kategorien Stadt, Land, Fluss, Name, Beruf, Pflanze und Tier vorgegeben. Download
- Für alle, die ihre Kategorien selbst vergeben wollen, gibt es hier eine leere Vorlage zum Herunterladen. Lediglich die Spalteneinteilung und die Spalte für die Punkte sind bereits vorgegeben. Download
- Spielbogen mit einer Variante, bei der zusätzlich zu den “üblichen” Kategorien, es eine Spalte für Essen und eine für Künstler gibt. Essen ist dabei sicherlich alles, was sich in den Bereich Lebensmittel zuordnen lässt. Bei Künstler sind Lösungen von Bands, über Sänger/innen, Maler, Dichter, Schauspieler, Autoren usw. passend. Download
- Spielbogen mit einer weiteren oft gespielten Variante. Hier kommen zusätzlich die Kategorien Automarke und Kleidung ins Spiel. Download
- Wenn man mit jüngeren Kindern spielt, ist vor allem die Kategorie “Fluss” oft eine unüberwindbare Hürde, die auch schnell Frust aufkommen lässt. Hier besser etwas wie “aus der Schule” und/oder “Sportart”, “Promi”, “Essen” oder ähnliches mit aufnehmen. Download
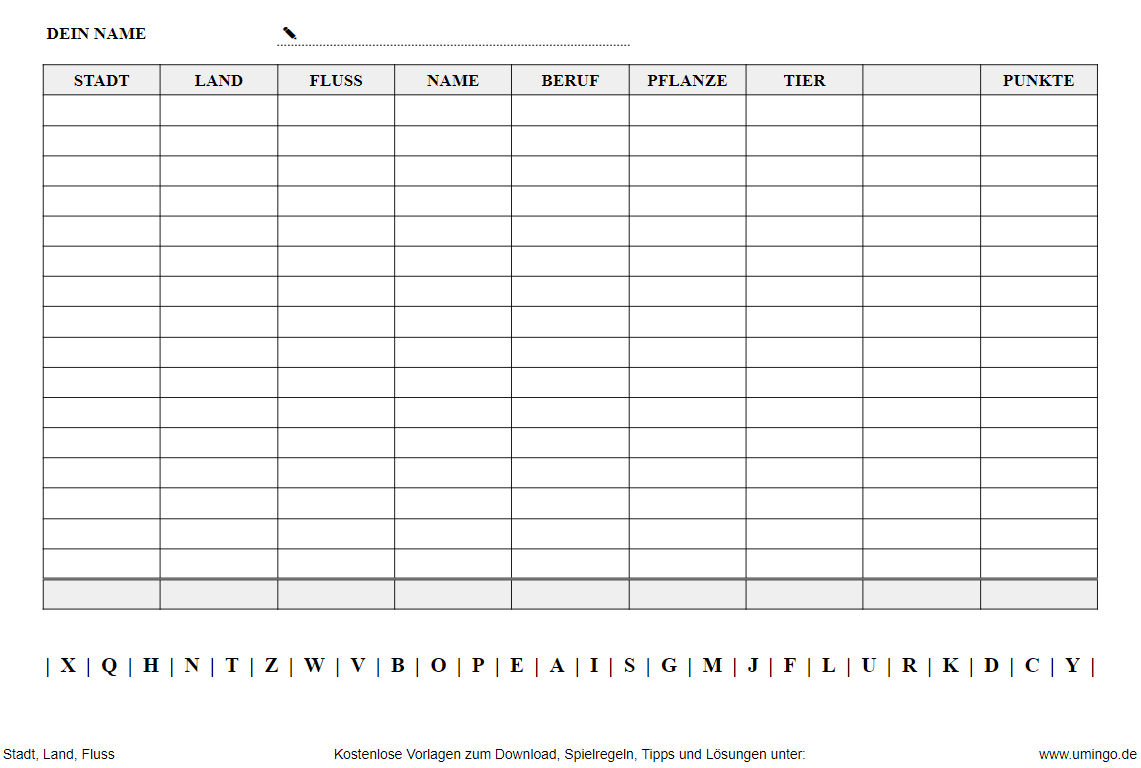
Wer sich fragt, wozu die Buchstabenleiste am Ende der Vorlage ist
Eine Alternative zum still vor sich Hersagen des Alphabets. Bewegt einfach den Finger langsam oder schneller hin und her. Es wird dann der Buchstabe für die nächste Spielrunde genommen, auf dem der Finger (in etwa) ruht, wenn der andere Spieler “Stopp” sagt.
Zudem kann bereits bespielter Buchstabe hier auch durchgestrichen werden.
Wie spielt ihr das Spiel? Habt ihr weitere Ideen für zusätzliche Stadt, Land, Fluss Vorlagen und Kategorien?
Sicher ist eine Aufteilung von weiblichen und männlichen Vornamen eine Idee. Je nach Hobbies der Mitspieler ließen sich auch Fischarten, Promis, Modemarken, Filme und so weiter mit aufnehmen. Auch Begriffe, die den gesuchten Buchstaben doppelt enthalten oder mit diesem enden. Bei schwierigen Buchstaben, wie das X oder das Y, könnte man auch die Ausnahme machen, dass es ausreicht, wenn der Buchstabe irgendwo im Wort vorkommt.
Wer hierzu Vorschläge hat, kann diese gern in den Kommentaren hinterlassen.
Kategorie :Fetische
Kategorie: Süßigkeiten oder Obst/Gemüse